ロボット掃除機「ルーロ ミニ」 MC-RSC10


小さいボディで小回りが利くから、狭い場所もしっかりお掃除。
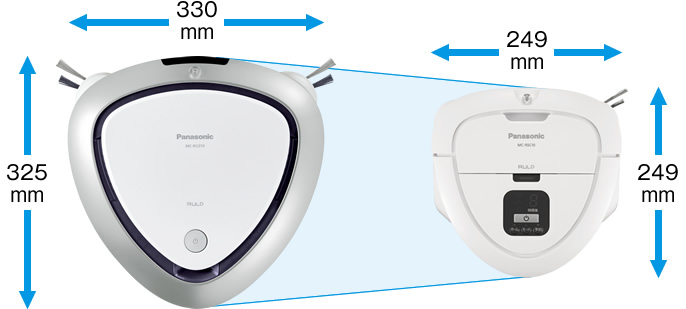
NEW 【特長1】狭いところもラクラクお掃除できるコンパクトサイズ
ルーロ本体の面積を約40%カット。*
コンパクトボディで椅子の下もスイスイ走行
*当社従来品MC-RS810との比較。
狭いすき間も

ソファの下も

椅子の下も

【特長2】独自の三角形状(ルーロー形状)で、部屋のスミや壁ぎわのゴミまでよく取れる
「ルーローの三角形状」によって、部屋のスミまでブラシが入り込み、本体を左右に振りながら動くので、しっかりとゴミをかき出すことができます。
また、壁ぎわを検知して走行するので、ゴミがたまりやすい壁ぎわを徹底的に掃除します。

【特長3】小さくなっても性能は同じ。効率よく集じん
■集めたゴミを逃がさない。工夫満載のブラシ
吸込口の近くに、サイドブラシを配置。V字型構造のブラシで中央にゴミを集め、しっかり吸い込み、取り残しを防ぎます。
●毛先がY字になった白ブラシで、床の細かなゴミまでしっかり掃除します。
●進行方向と逆回転するブラシで、じゅうたんの奥のゴミをかき出し、浮き上がったゴミを吸い取ります。

NEW ■「スパイラル走行※1」が加わり、効率よくしっかり掃除
ラウンド走行で、ゴミの多いスミ・壁ぎわを重点的に掃除。そのあとはランダム走行で、部屋全体をくまなく掃除します。
さらに、ランダム走行中に「1畳以上の空間」を見つけると、空間の中央に行き「スパイラル走行※1」。広いスペースも効率よく掃除します。

■音ひかえめモード※2で、実感音 約20%カット※3
音ひかえめモード※2で自動モード時より運転音をさらに抑えることができ、マンションでも気になりません。

【特長4】こまやかに効率よく走行し、しっかり掃除


超音波センサーは、前方の広範囲に音波を出すことで、鏡面や黒色・透明な障害物も検知します。
右サイドに配置された赤外線センサーは、障害物までの距離を検知。壁沿い走行が可能です。
【特長5】クリーンセンサーで「見えないゴミ」まで逃がさない


目に見えない約20 μmのハウスダストまで検知する「クリーンセンサー」。ゴミが多いところでは自動でパワーアップするなど、ゴミの量に応じて動作を制御。キレイになるまで同じ場所を往復し、しっかり掃除します。
【特長6】軽々運べて使いやすい
■本体約2 kgだから、持ち運びもラクラク

■お手入れもカンタン
ツイン気流で約3倍**の量のゴミを集じん。
**当社試験ゴミによる、圧縮前後の試験ゴミの体積を比較。音ひかえめ設定時を除く。当社試験ゴミによるものであり、ゴミの種類や量などによって異なります。

・ゴミすてもラクラク
ダストボックスは天面から取り出せて、ゴミ捨てもラクラク!

「PUSH」部を押して、ワンタッチでゴミ捨て

フィルターやダストボックスは丸ごと水洗いすることもできます。

・ブラシは水洗いもOK
ブラシは簡単に取り外してお手入れできます。

外したブラシは水洗いもOK

●水洗い後のパーツは、風通しの良い場所で十分に乾燥させてください。
■電池は長寿命
当社独自の高効率リチウムイオン電池搭載(セルフ電池交換可能)で、長寿命(充電サイクルは約1,100回)を実現。
※1 ランダム走行のため、環境や障害物の配置により、スパイラル動作しない場合があります。
※2 音ひかえめモードにすると、通常よりゆっくり動いて静かに掃除します。
※3 MC-RSC10 自動モード時(SONE 値 8.36、dB値54.40 dB)とMC-RSC10 音ひかえめモード時(SONE 値 6.69、dB値50.80 dB)の比較。ウレタン上においた0.9 m×0.9 mの床材上を自動モード・音ひかえめモードで走行させて、床材中心の上方1.5 mで当社自主基準試験方法により測定。騒音レベルを表す単位はdBですが、実際耳に聞こえる音の大きさとして定められた尺度が、音の感覚量SONE(ソーン)です。
ルーロ 機能比較

MC-RSF1000★ |

MC-RSF700★ |

MC-RSF600★ |

MC-RSC10 |
|
|---|---|---|---|---|
| クリーンセンサー | ||||
| 障害物検知 センサー |
・360 °レーザー (幅約2 cm*1) ・赤外線(壁を検知) ・超音波(鏡面や黒色) |
・360 °レーザー (幅約2 cm*1) ・赤外線(壁を検知) ・超音波(鏡面や黒色) |
・360 °レーザー (幅約2 cm*1) ・赤外線(壁を検知) |
・赤外線(壁を検知) ・超音波(鏡面や黒色) |
| その他 センサー |
・落下防止センサー*2 ・床面検知センサー ・フロント3Dセンサー |
・落下防止センサー*2 | ・落下防止センサー*2 | ・落下防止センサー*2 |
| RULO ナビ (IoT 機能)*3 |
● リアルタイムマップ/ゴミマップ/運転モード/エリア指定/スケジュール |
● リアルタイムマップ/ゴミマップ/運転モード/エリア指定/スケジュール |
● リアルタイムマップ/ゴミマップ/運転モード/エリア指定/スケジュール |
― |
| スマートスピーカー対応*4 | ● | ― | ― | ― |
| レーザーSLAM | ● | ● | ● | ― |
| 走行制御 | エリア分割 ラウンド&ルート走行 |
エリア分割 ラウンド&ルート走行 |
エリア分割 ラウンド&ルート走行 |
ラウンド&ランダム+スパイラル走行*5 |
| アクティブ リフト |
● (最大2.5 cm*6) |
― | ― | ― |
| 最大稼働面積*7 | 約130畳*8 | 約120畳 | 約50畳 | 約20畳 |
| 運転モード | 自動・お手軽・徹底掃除・エリア指定・スポット | 自動・お手軽・徹底掃除・エリア指定・スポット | 自動・お手軽・徹底掃除・エリア指定・スポット | 自動(予約設定可能)・スポット |
| 連続使用時間 | 約100分(満充電・電池初期/20 ℃時) | 約100分(満充電・電池初期/20 ℃時) | 約70分(満充電・電池初期/20 ℃時) |
約80分(満充電・電池初期/20 ℃時) |
| 集じん容積 | 0.25 L | 0.25 L | 0.25 L | 0.15 L |
| 付属品 | 充電台(1個)、 電源コード(1本)、 お手入れブラシ(1本) |
充電台(1個)、 電源コード(1本)、 お手入れブラシ(1本) |
充電台(1個)、 電源コード(1本)、 お手入れブラシ(1本) |
充電台(1個)、 充電アダプター(1個)、 お手入れブラシ(1本) |
*1 環境や家具の配置・色・素材により検知しない場合があります。
*2 お手入れ不足の状態や特殊な環境下では落下防止センサーが作動しない可能性があります。階段などの落下に注意が必要な場合必ず障害物を設置するなど予防策を実施してください。
*3 Android5.0以上、iOS10.0以上をお使いください。「RULOナビ」アプリはタブレット端末には対応していません。Wi-Fi環境が必要です。セキュリティ対策のため、必ず暗号化方式WPA2またはWPA(いずれもTKIPまたはAES)の設定ができる無線LANルーターをご使用ください。通信環境や、使用状況によっては、ご利用できない場合があります。「RULOナビ」アプリのサービスのご利用にはパナソニックの会員サイト「CLUB Panasonic」への登録が必要です。Androidは、Google LLCの登録商標です。MC-RSF1000・RSF700・RSF600のすべての機能をお使いいただくためにはスマートフォン及びWi-Fi環境が必要です。通信環境や使用状況によっては、ご利用できない場合があります。
*4 「OK Google」 搭載スマートスピーカー(別売)が必要です。
- Google、Google Nest Miniは、Google LLCの商標です。
*5 ランダム走行のため、環境や障害物の配置により、スパイラル動作しない場合があります。
*6 床面の材質や形状によって乗り越えられない場合があります。
*7 当社試験環境による試験結果。床の材質、部屋の形状、家具の配置、充電台の位置、ゴミの量により異なります。
*8 専用アプリ「RULOナビ」による本体ソフトウェアのアップデートが必要です。アップデートは2020年10月下旬より開始予定
【リアルタイムマップについて】
<運転時のお知らせ>
・スムーズに本体が動くように部屋を整えると、実際の間取り、ロボットの動きに応じたリアルタイムマップが表示されます。
・ロボットはレーザーセンサーで測定した壁までの距離とタイヤの回転情報などからリアルタイムでマップを作成して自分の位置を認識し、掃除ルートを決めています。次のような場合には、実際の間取りと異なる壁や床が表示されたり、ロボットが実際と異なる位置に表示されたり、部屋全体をうまくお掃除できないことがあります。
-
じゅうたんや段差などで本体のタイヤがスリップしたり、本体が傾いたとき
-
掃除中にドアを開閉したり、家具などの配置を変えたりしたとき
・レーザーを透過するガラスや反射する鏡などがある場合は壁や床が正しい位置に表示されない場合があります。
・充電台周辺の部屋の形状をもとにマップの向きを決定しています。次のような場合はマップが斜め向きに回転して表示されることがあります。物、もしくは充電台の置き場所を変更して再度運転してください。
-
充電台周辺に斜めに物を置いた時
★印は在庫が僅少な商品です。ご購入の際は販売店にお確かめください。


